
Load fence path
Instead of being manually digitalized, fences can also be imported by clicking on ![]() Load fence path from fence parameters in a 3D scene. Points which define the fences can be contained in:
Load fence path from fence parameters in a 3D scene. Points which define the fences can be contained in:
- a Shapefile (.shp),
- a CSV file (.csv),
- an Isatis.neo Polyline file.
Shapefile
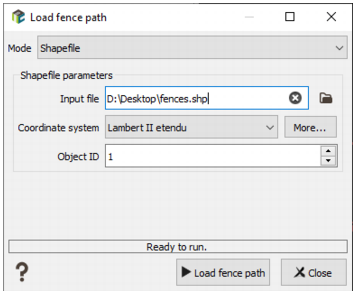
- Input file: Select the CSV file, click the folder icon to pop up a window file selector.
- Coordinates system: Select in the list the correct projection system. The most common projection systems are preselected. If the projection you are looking for is not in this list, click More to open the Coordinate System Selector window.
- Object ID: Select the identifier of the data table you want to import.
CSV file
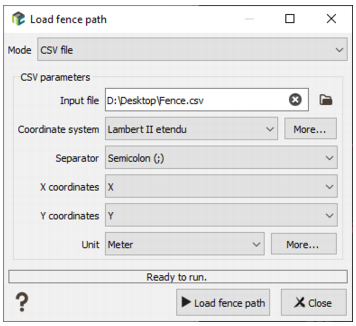
- Input file: Select the CSV file, click the folder icon to pop up a window file selector.
- Coordinates system: Select in the list the correct projection system. The most common projection systems are preselected. If the projection you are looking for is not in this list, click More to open the Coordinate System Selector window.
- Separator: Define the given character that separates the columns (, ; / #...).
-
X/Y coordinates: this is the X and Y coordinates of the points which define the continuous set of panels. Importing a file, each coordinate value must be defined. Otherwise an error message will occur.
If the selected Coordinate system is Geographic, the interface will ask to define the Longitude and Latitude variables.
- Unit: Select here the unit of the X and Y coordinates. If the Unit that you want to use is not proposed in the list, you can define your own unit by clicking on the More button. This parameter is not available if the selected Coordinate system is Geographic.
Polyline file
- Polyline file: Select the polyline file, click the folder icon to pop up a data tree selector. This file should have been previously created or imported in Isatis.neo.
- Polyline: as a polyline file may contain several polylines, select the one you want to import.
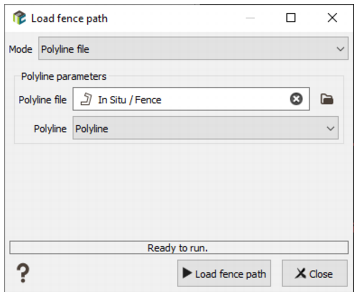
Once you have defined all the parameters click Load fence path to end the task.